ウェアラブルスマートグラスを用いた歩行者の横断意図予測
研究背景、概要、目的
自動運転車では歩行者との衝突を避けるためにその動きを予測する必要がある。車載カメラやセンサーにおける歩行者の行動予測は研究が進んでいるが、障害物などの環境により死角が生じるため歩行者の動きを完全に捉えることは難しい。
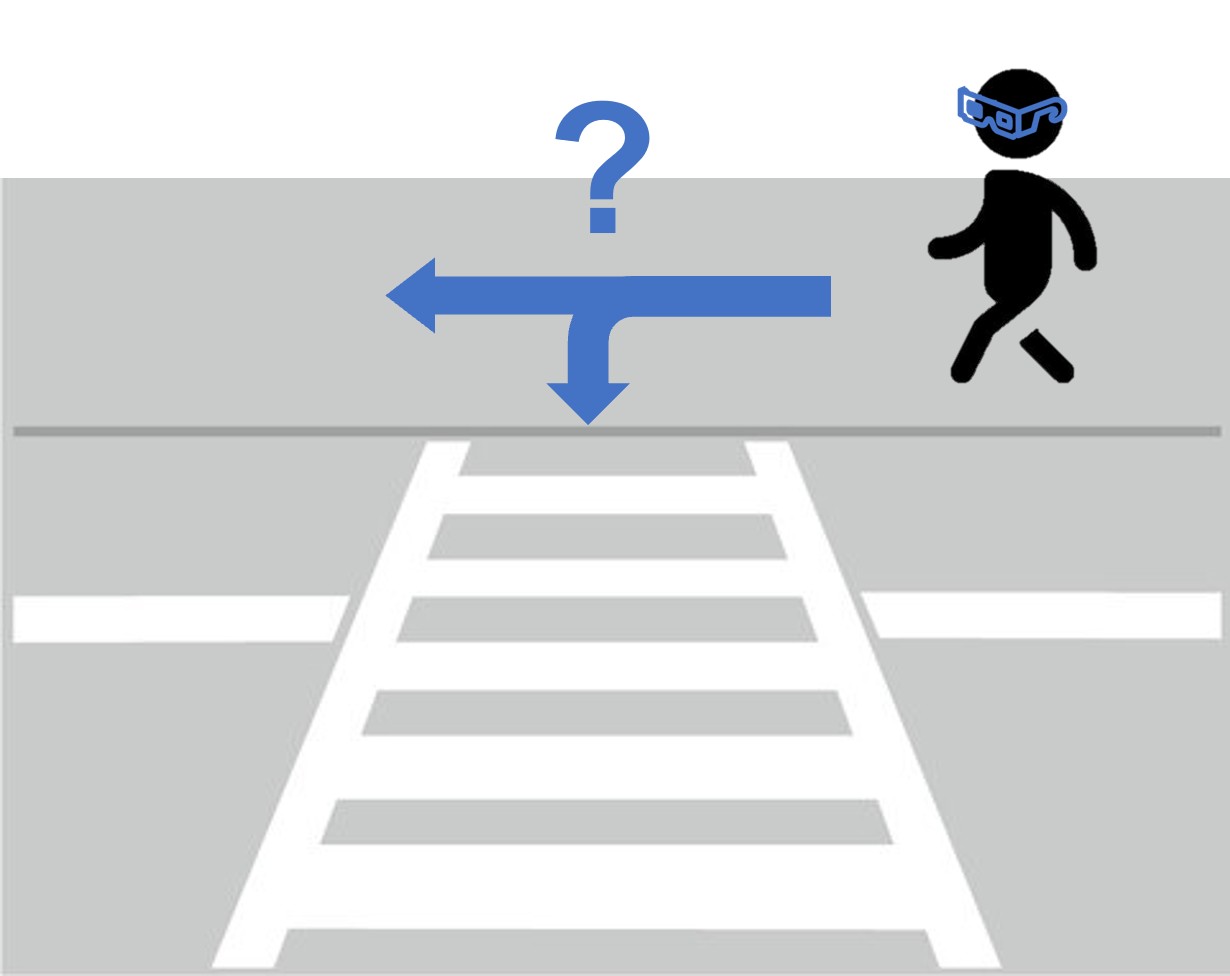
そこで本研究では、ウェアラブルスマートグラスを利用し、歩行者の一人称視点(FPV)映像からの行動予測を信号なし横断歩道に着目して行う。具体的には、独自のFPV映像データセットから、3DCNN、CNN-RNN、Transformerの3つのモデルを用いて、歩行者が信号なし横断歩道を数秒後に横断するか否かの2クラス分類を行い、各モデルの性能を比較することで最も良好な結果を示すモデルを明らかにした。
参考文献
・Jianing Qiu, Lipeng Chen, Xiao Gu, Frank P.-W. Lo, Ya-Yen Tsai, Jiankai Sun, Jiaqi Liu, and Benny Lo. Egocentric human trajectory forecasting with a wearable camera and multi-modal fusion. IEEE Robotics and Automation Letters, Vol. 7, No. 2, pp. 1050–1057, 2022.
・Weizhuo Wang, C. Karen Liu, and Monroe Kennedy III. Egocentric scene-aware human trajectory prediction. arXiv preprint arXiv:2403.19026, 2024.