3D物体検出に関する研究
研究背景、概要、目的
自動運転には、安全で適切な運転判断のために3Dシーン理解と周囲環境の認識を行う3D物体検出手法が重要であり、特に低コストのセンサであるカメラを複数個用いるマルチカメラ手法が注目されている。
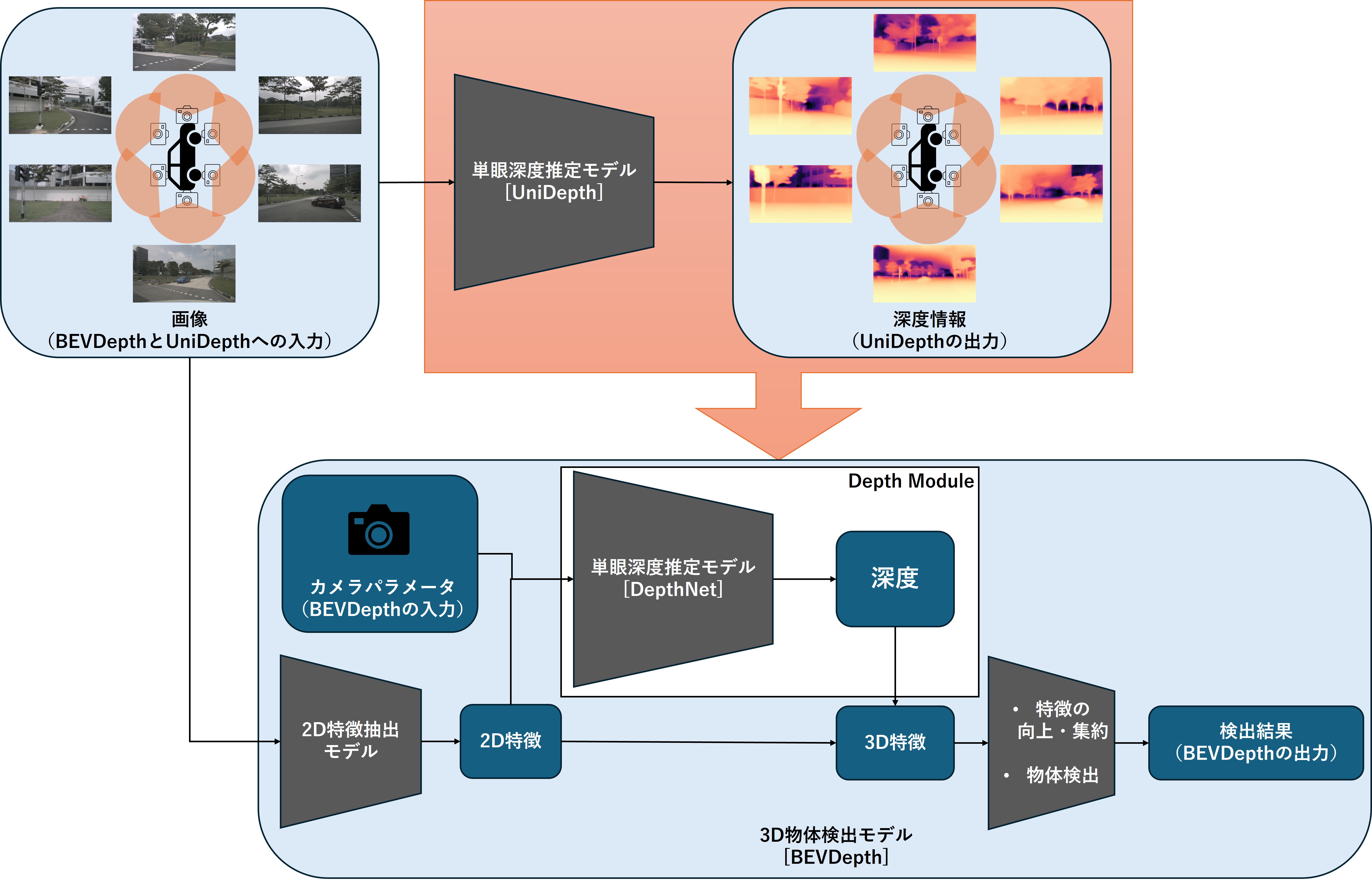
しかし、マルチカメラ手法では、手法内での画像の3D情報獲得のために必要な画像の深度(奥行き・距離情報)の推定結果の不正確さとカメラ間での結果の矛盾により物体検出結果が不安定となる課題点がある。
この課題点に対し、入力に画像のみを用いる高精度な単眼深度推定モデルを3D物体検出モデルに適用することによる物体検出結果の精度向上を目的とする。
参考文献
- BEVDepth
Li, Yinhao, et al. "Bevdepth: Acquisition of reliable depth for multi-view 3d object detection." Proceedings of the AAAI conference on artificial intelligence. Vol. 37. No. 2. 2023.
- UniDepth
Piccinelli, Luigi, et al. "UniDepth: Universal monocular metric depth estimation." Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2024.
- nuScenes
Caesar, Holger, et al. "nuscenes: A multimodal dataset for autonomous driving." Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2020.